
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

UAV-Kommunikationsverbindungen stören Mikrowellenfrequenzbänder
Im Gegensatz zum Radar, das Ziele erkennt, besteht der Zweck eines Kommunikationssystems darin, Informationen von einem Ort zum anderen zu übertragen. Daher unterscheidet sich eine Störung von Kommunikationssystemen von einer Störung von Radarsystemen. Ein einfaches Kommunikationsstörungsszenario ist unten dargestellt:

Dabei ist die Leistung S des vom Empfänger empfangenen Nutzsignals = ERps-LS +Gr, wobei ERPs die äquivalente Strahlungsleistung (dBm) des Nutzsignalsenders in Richtung des Empfängers, Ls die Verbindungsdämpfung (dB) und Gr der Gewinn (dB) der Empfangsantenne in Richtung des Nutzsignalsenders ist.
Das Störobjekt des Störsenders ist der Zielempfänger und nicht der Sender. Dies unterscheidet sich von der Störung des Radarsystems, da sich der Sender des Radars normalerweise am selben Ort wie der Empfänger befindet.
Wenn eine Störung der Verbindungen unbemannter Luftfahrzeuge (UAV) in Betracht gezogen wird, muss das störende Objekt berücksichtigt werden. Die Drohne verfügt über eine Steuerverbindung von der Kontrollstation zur Drohne, auch Uplink genannt; Es verfügt außerdem über eine Datenverbindung von der Drohne zur Kontrollstation, auch Downlink genannt.
Störung der Steuerverbindung
Der Steuerlink ist ein Uplink, das Störziel des Störsenders ist also das UAV. Das Störszenario ist in der folgenden Abbildung dargestellt, und es werden einige allgemeine Parameterannahmen gegeben: Der Schmetterlingsantennengewinn der Kontrollstation beträgt 20 dBi, die Nebenkeulenisolation beträgt 15 dB und die Senderleistung beträgt 1 W. Das UAV ist 20 km von der Bodenstation entfernt und der Antennengewinn des UAV beträgt 3 dBi.
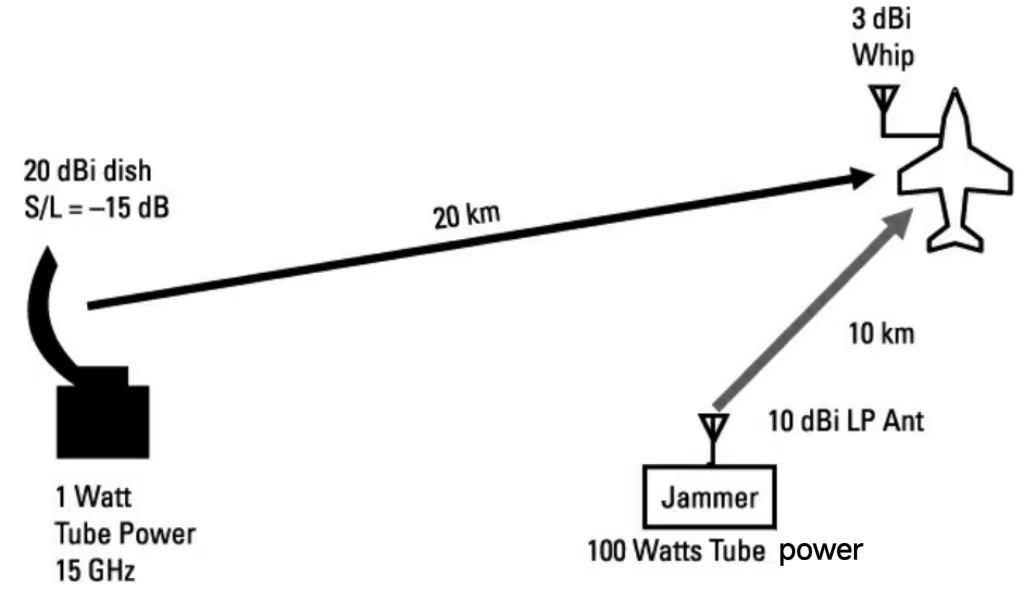
Wenn der Störsender auf die Drohne gerichtet ist, sind die ERPs des vom Zielempfänger empfangenen Nutzsignals:
30 dBm + 20 dB = 50 dBm;
Uplink-Verlust:
Ls=32,4+20log(20)+20log(5000)=132,4dB;
Die Interferenzentfernung beträgt 10 km vom UAV und der Interferenzverbindungsverlust wird berechnet:
Lj=32,4+20log(10)+20log(5000)=126,4dB;
EPRj des Störsenders: 50 dBm + 10 dB = 60 dB;
Hier wird davon ausgegangen, dass die Empfangsantenne des UAV eine Peitschenantenne ist und der Gewinn in Richtung der Bodenstation und der Richtung des Störsenders gleich ist, sodass das Trockensignalverhältnis J/S(dB)=ERPj-ERPs-Lj+Ls=16dB berechnet werden kann.
Störung der Datenverbindung
Die Datenverbindung ist gleichzeitig eine Abwärtsverbindung, und das Störziel des Störsenders wechselt zur Bodenstation. Da davon ausgegangen wird, dass die Schmetterlingsantenne von der Bodenstation übernommen wird, tritt das Störsignal normalerweise von der Seitenkeule ihrer Antenne ein, und die Störungsszene ist wie folgt:

Zu diesem Zeitpunkt beträgt das Nutzsignal ERPs = 33 dBm, der Verbindungsverlust beträgt 132,4 dB; Der ERPj des Störsenders beträgt 60 dBm, und die Verstärkung der Bodenstation in Richtung des Störsenders ist 15 dB niedriger als die Verstärkung der Hauptkeule, in der sich das UAV befindet, also 20-15 = 5 dBi, und das Trockensignalverhältnis wird wie folgt berechnet:
J/S(dB)=ERPj-Lj+Gj-(ERPs-Ls+Gr)=12dB;
Anfrage absenden
X
Wir verwenden Cookies, um Ihnen ein besseres Surferlebnis zu bieten, den Website-Verkehr zu analysieren und Inhalte zu personalisieren. Durch die Nutzung dieser Website stimmen Sie der Verwendung von Cookies zu.
Datenschutzrichtlinie